The feedback loop concept has several sources, and there are several different ways to think about it. One way is to think about the meaning of cause and effect. People often think about variable A causing outcome B to happen, and that being the end of it—a straight line from cause to effect. The logic behind feedback processes is that that picture often is too simple. Sometimes variable A causes outcome B, but outcome B then turns around and exerts an influence (directly or indirectly) on variable A, the original cause. This, in turn, causes variable A to make something else happen with respect to outcome B. In this circumstance, there is not a straight line of cause and effect, but a closed loop. Causality occurs all around the loop.
Another way to approach the concept is to think about so-called self-regulating systems and how they work. A self-regulating system tries to keep some condition fixed, even in the face of various kinds of disturbances from outside. For example, a heating and cooling system with a thermostat acts to keep the temperature of a house confined to a narrow range, corresponding to the thermostat’s setting. How does it do that? The thermostat is a device that senses current air temperature and compares it to a set point. If air temperature gets noticeably higher than the set point (deviates from it far enough), the thermostat sends a message to activate the air conditioner part of the system. That’s not the end, though. The thermostat keeps on checking current air temperature, and when the temperature returns to the set point, it allows the air conditioner to turn off. In a system that is sophisticated enough, deviations in either direction trigger the appropriate response (if the air temperature falls too low, the message goes not to the air conditioner but to the heater).
The component elements of this system are illustrated in Figure 1. There is some sort of sensing or perception of current conditions (an input), some sort of reference value or set point, some way of comparing the perception to the reference point, and some way of making things happen (an output). As suggested at the beginning of this discussion, what happens in the output can have an effect on current conditions, which causes the perception of current conditions to change. This in turn creates a ripple of causal influence to run through the system again—and again and again, each time the output changes the current conditions.
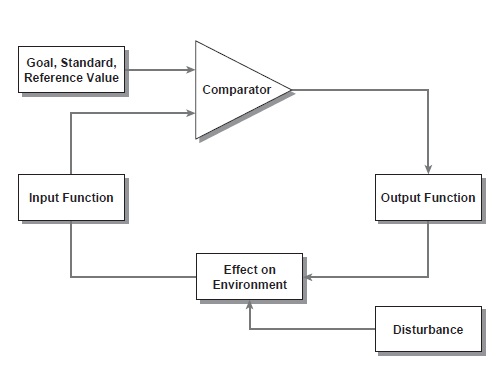
Figure 1 Schematic Depiction of a Feedback Loop
Of course, the output isn’t the only thing that can change current conditions. Unexpected disturbances of various sorts can also change the existing state of affairs. For example, weather outside will influence the temperature of the air in the room; so will filling the room up with people for a party. Both of these disturbances influence the current conditions perceived by the thermostat and thus the behavior of the system.
Engineers use this sort of thinking to design mechanical and electronic systems, but the same sort of reasoning can be applied easily to self-regulation in a living system. As a simple extension of the example just used, if you are outside on a very warm day, your body heats up. The temperature regulator in your body detects that you are getting warmer than normal body temperature and calls for perspiration, which cools you back down. If a cold breeze chills you, the temperature regulator calls for your body to shiver, which generates heat. This process is an example of what is called homeostatic self-regulation. Alternatively, in either of these cases, a more elaborate output could occur, which involves bigger chunks of behavior than sweating and shivering. That is, if you get too warm, you might take off your jacket or even go indoors where the air conditioner is on. If you get too cold, you might put your jacket on or go someplace where there’s a toasty fireplace.
Now let’s take this reasoning a couple of steps further. One step is to make the reference point be a moving target (e.g., your home’s temperature control system might be programmed to raise the set point at night and lower it during the day). Another step is to make the whole thing be about behavior. Imagine that people’s goals for what they want to do today (or this week, or in their lives in general) are reference values for feedback loops. Put these steps together, and you get a person who looks at existing conditions, compares them to the desired goal, and takes steps to make the existing conditions come into closer conformity to the goal, even as the goal keeps changing and evolving. For example, your goal is to buy a present for a friend, so you have to leave your house (one goal within the broader one) and get into your car and drive to a store (another goal) and find what you want (another one) and pay for it and bring it home. The person keeps making changes to bring the experienced condition into conformity with the next step in the path needed to reach the overall goal. It could be a concrete goal, such as seeking out and buying a present, or a more abstract goal, such as forming and maintaining a close relationship with someone. In either case, the same basic processes are involved. Some believe that these are the processes that underlie purposive behavior.
A good deal of complexity is added by the fact that people are often interacting with other people, all of whom have goals. Sometimes acting to make the conditions you experience closer to what you want entails having other people also experience a match between what they see and what they want. Sometimes you discover that it’s hard to make existing conditions match what you want, because doing that creates problems for other people’s goals. A lot of events can be understood in terms of what would need to happen to make various people’s perceptions match their goals.
One more twist that can make everything more difficult: Although it is easiest to understand the feedback concept from looking at a system that has all the elements shown in Figure 1, strictly speaking it isn’t necessary for all those elements to be there. In particular, it is possible for loops to be created in which no set point is explicitly represented. Something about the overall circumstances causes changes in the output to shift back and forth in such a way that the input remains relatively stable (or is held within limits). Typically this involves a response from the environment that is somehow coordinated with the output, so that a particular output creates circumstances that cause further output to be less necessary, and a reduction in output causes circumstances to shift back so that further output is necessary again. With respect to the most recent behavioral example, sometimes a person has a goal to make something happen, and sometimes that very thing happens predictably with no goal being involved.
More concretely, you may set a goal for yourself of studying about 2 hours per evening. Alternatively, you may be nervous about your courses if you aren’t studying in the evening and bored after you’ve studied for a while, with the result that you tend to study for about 2 hours each evening. In the latter case, there would be no goal specifying how much to study. This second case is sometimes referred to with the phrase self-organization. It can be very hard to tell which case exists at any given time.
Another commonly used example of a self-organizing feedback loop (which also illustrates the fact that the feedback concept can be applied at various levels of abstraction) is an ecosystem made up of (for instance) an island colony of rabbits and a food source. The size of the food source controls the size of the colony by determining how many animals can live on it. The population converges on the value that is the system’s carrying capacity. If the population gets too large, some animals starve and the population falls. If the population falls below that value, there is surplus food and the population rises. There is no explicit reference value for population size, though, and this loop does not have the goal of stabilizing the size of the colony. Stabilizing the size of the colony is simply a consequence of the relations among the processes that form the loop. In cases such as this, it is reasonable to refer to the function of the loop, but not to the purpose of the loop.
Feedback loops are not about particular kinds of social psychological phenomena. But they can be seen as embedded in many kinds of social psychological phenomena. Easy examples are conformity, dissonance reduction, and social comparison. Feedback processes may be the underlying elements in far more phenomena than most people realize.
References:
- Carver, C. S., & Scheier, M. F. (1998). On the self-regulation of behavior. New York: Cambridge University Press.
- Miller, G. A., Galanter, E., & Pribram, K. H. (1960). Plans and the structure of behavior. New York: Holt, Rinehart & Winston.